Efficient Version-Space Reduction for Visual Tracking
14th Conference on Computer and Robot Vision, Edmonton, Canada, May 17-19, 2017.
Discrminative trackers, employ a classification approach to separate the target from its background. To cope with variations of the target shape and appearance, the classifier is updated online with different samples of the target and the background. Sample selection, labeling and updating the classifier is prone to various sources of errors that drift the tracker. We introduce the use of an efficient version space shrinking strategy to reduce the labeling errors and enhance its sampling strategy by measuring the uncertainty of the tracker about the samples. The proposed tracker, utilize an ensemble of classifiers that represents different hypotheses about the target, diversify them using boosting to provide a larger and more consistent coverage of the version-space and tune the classifiers' weights in voting. The proposed system adjusts the model update rate by promoting the co-training of the short-memory ensemble with a long-memory oracle. The proposed tracker outperformed state-of-the-art trackers on different sequences bearing various tracking challenges.
Overview
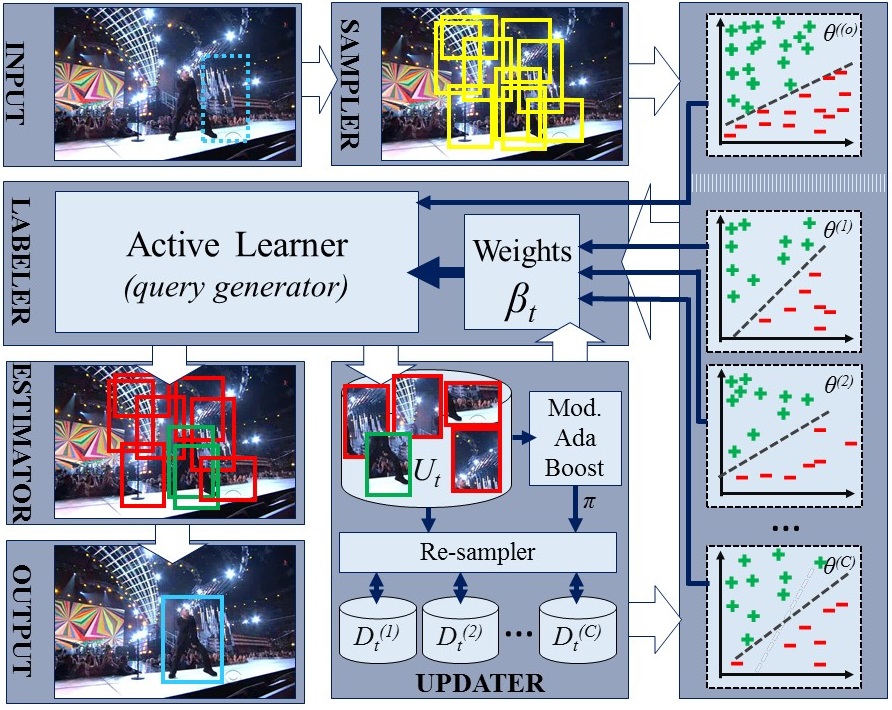
In this study, we propose the query-by-boosting tracker, QBST, a hybrid discriminative tracker, that employs the concept of co-tracking, in which a diverse short-memory ensemble of classifiers (the committee) exchange information with a long-memory classifier (the oracle) to reduce label-noise, balance the stability-plasticity equilibrium, and produce high-accuracy tracking results. This information exchange is built upon the concept of query-by-boosting, in which the optimal data to exchange is selected as the sample which the weighted majority voting by the committee has the least margin. The model update is performed by boosting each classifier to maintain a diverse committee, yet building an accurate strong classifier.
Query-by-boosting tracker maintains a diverse committee of classifiers to the label of the samples and queries the most disputed labels -which are the most informative ones- from a long-term memory oracle. By using the query-by-boosting principles, this tracker is efficiently shrinking the version space using the set of models in the committee. In addition by using boosting in updating the committee and adjusting their weight in the labeling process, the label noise problem is decreased because of:
- the local search in the version space to improve the quality of the models,
- updating classifiers only with the most informative samples (obtained by active learning) and most efficient samples (obtained by boosting),
- the weighted voting to assign the label to each sample based on the confidence of different committee members on their decision.
Success Plots
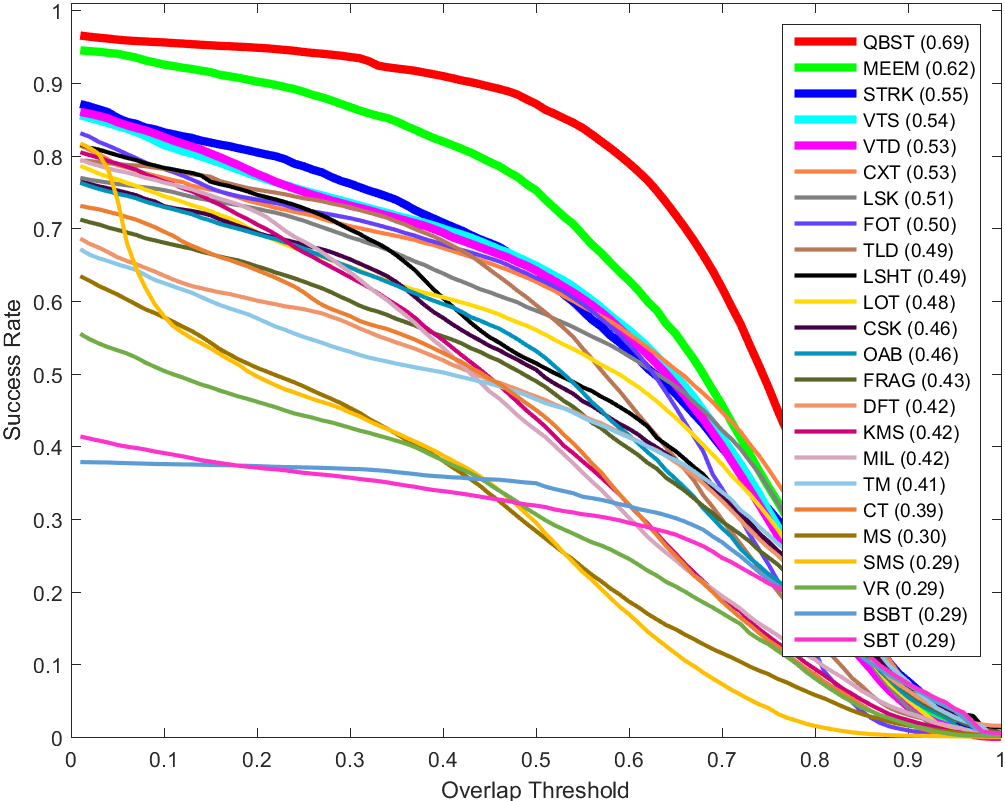 ALL
ALL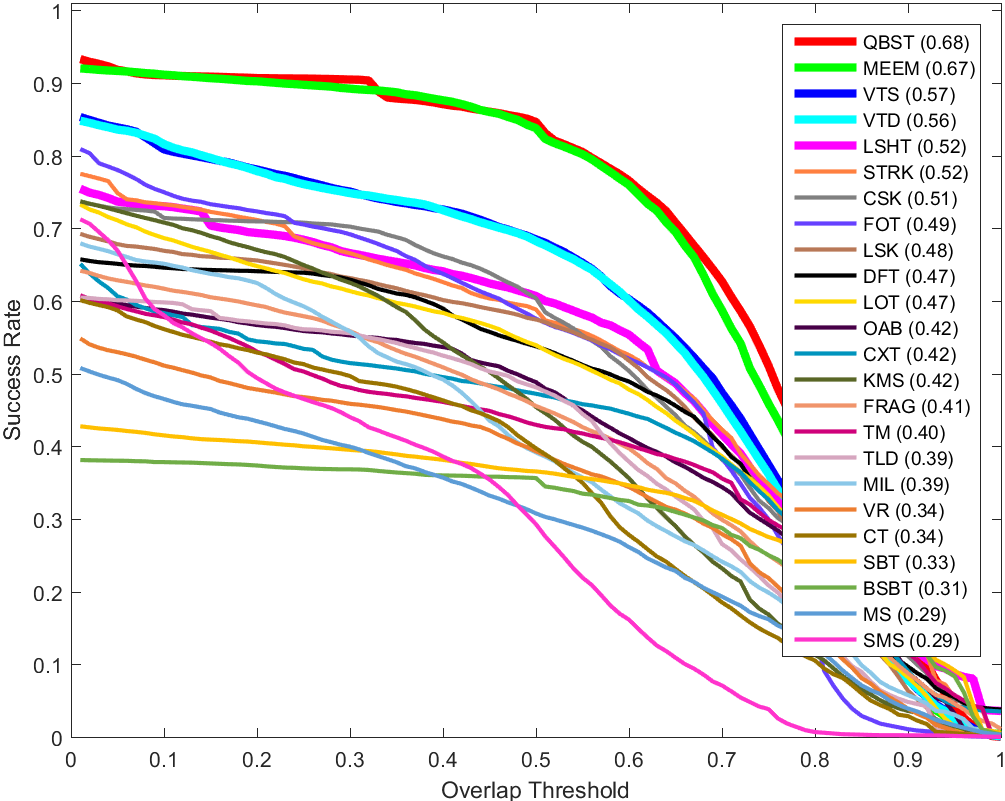 Clutter
Clutter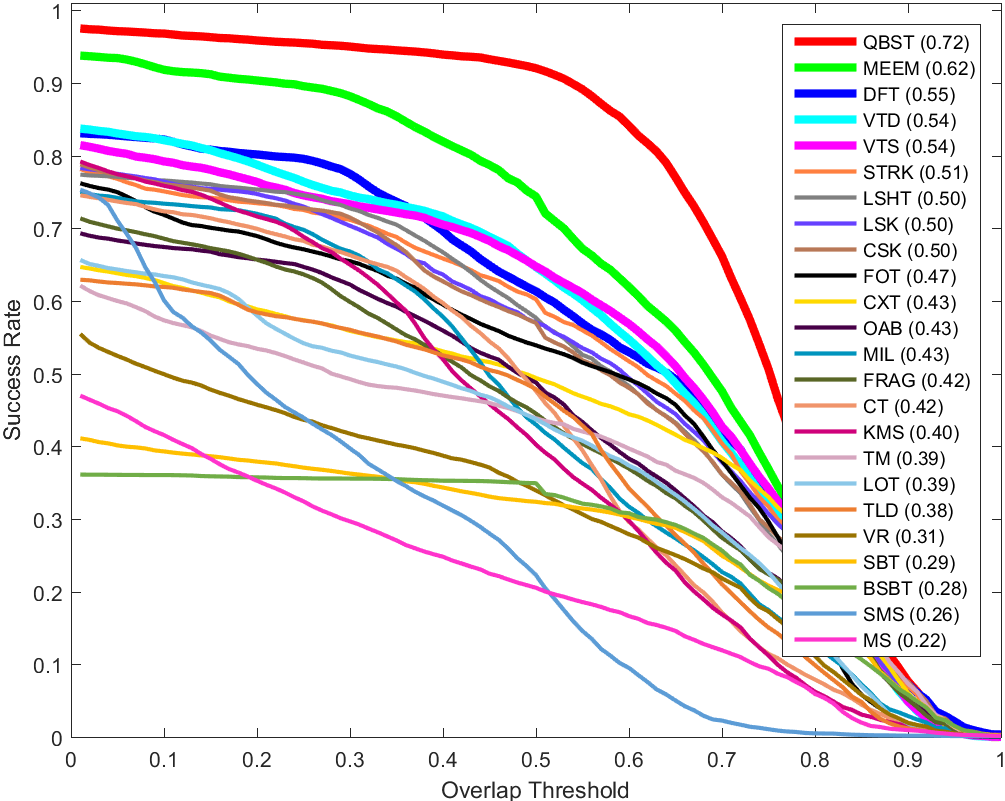 Deformation
Deformation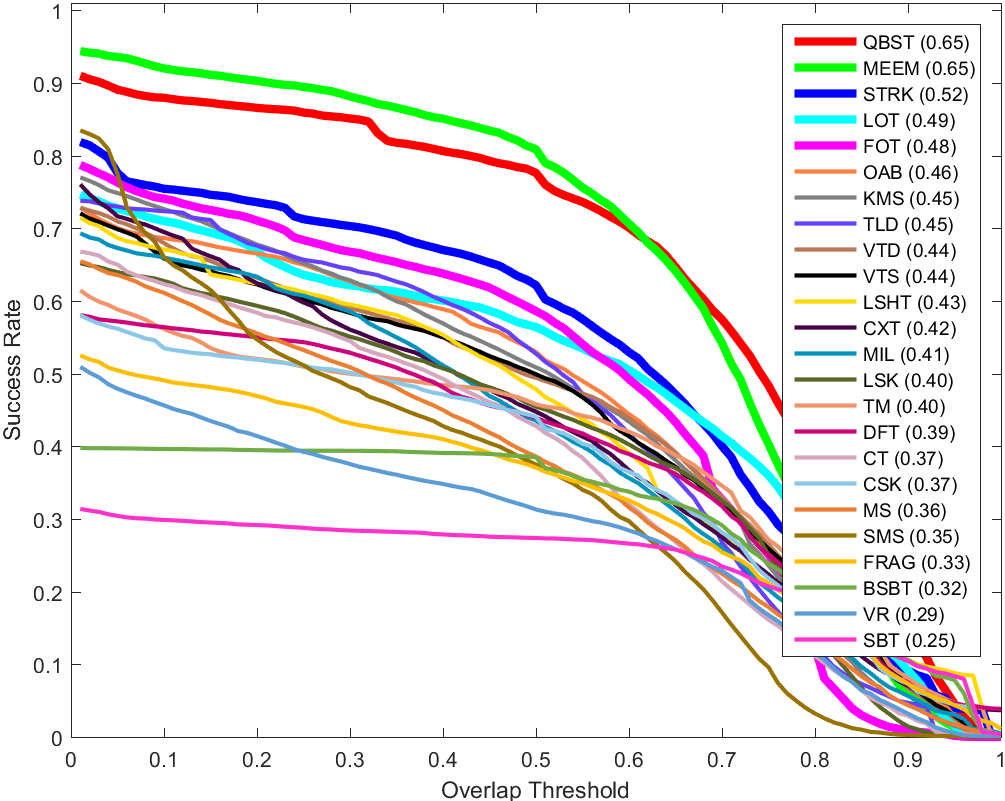 Fast
Fast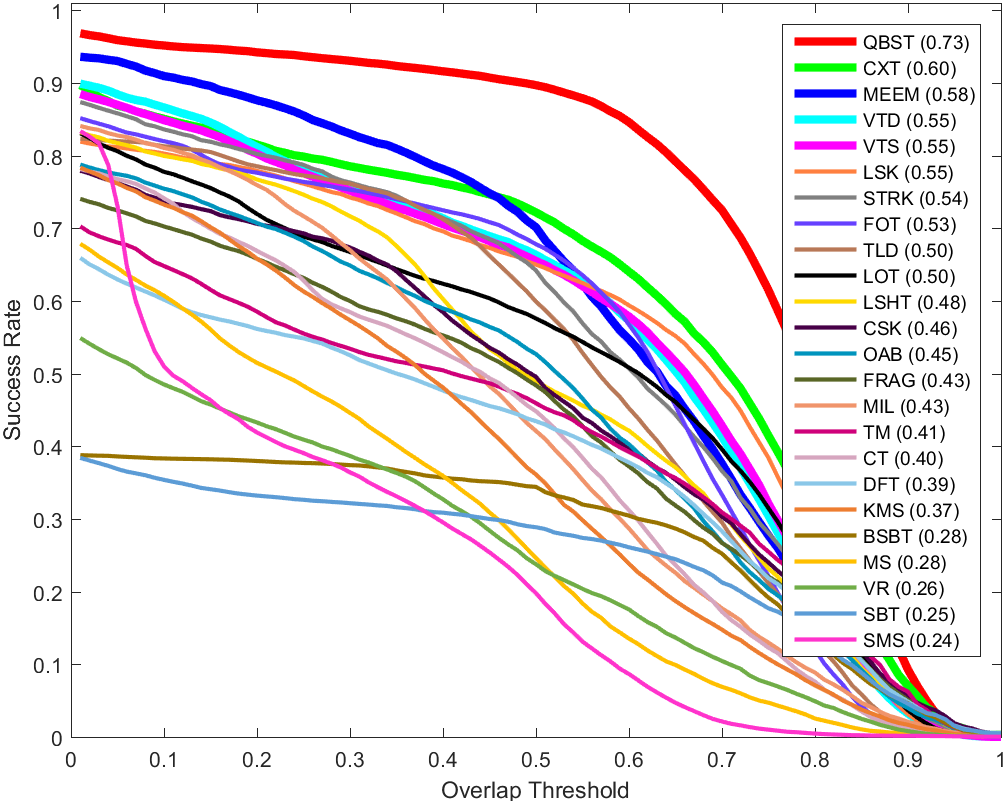 2D Rotation
2D Rotation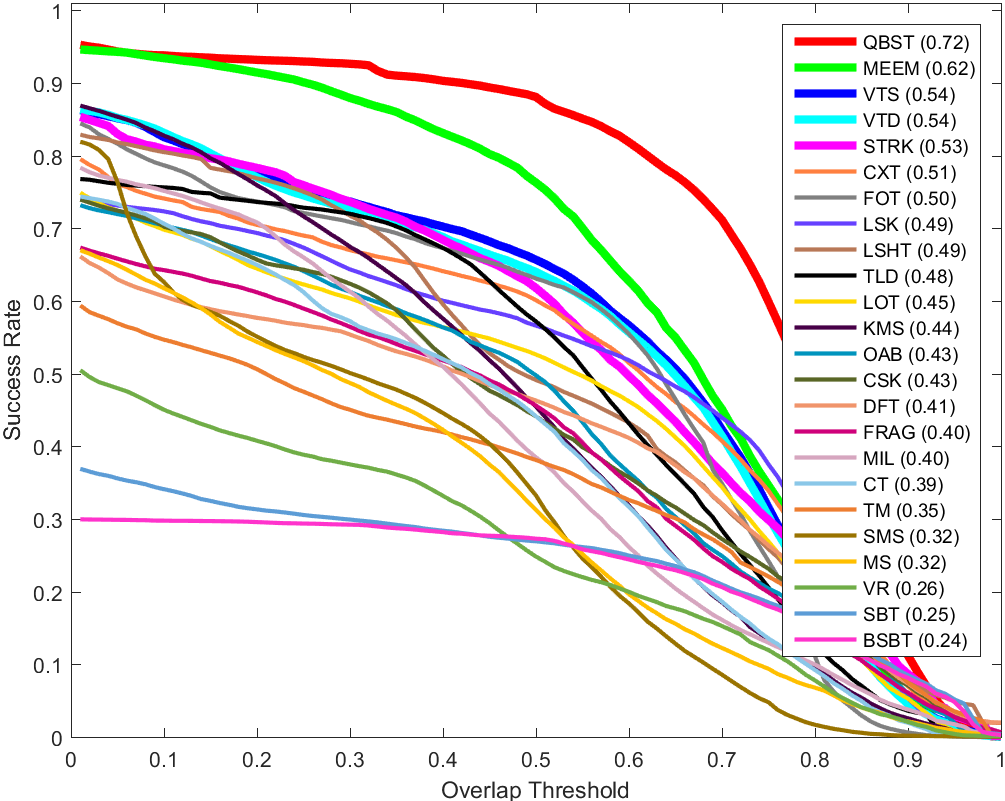 Lighting Change
Lighting Change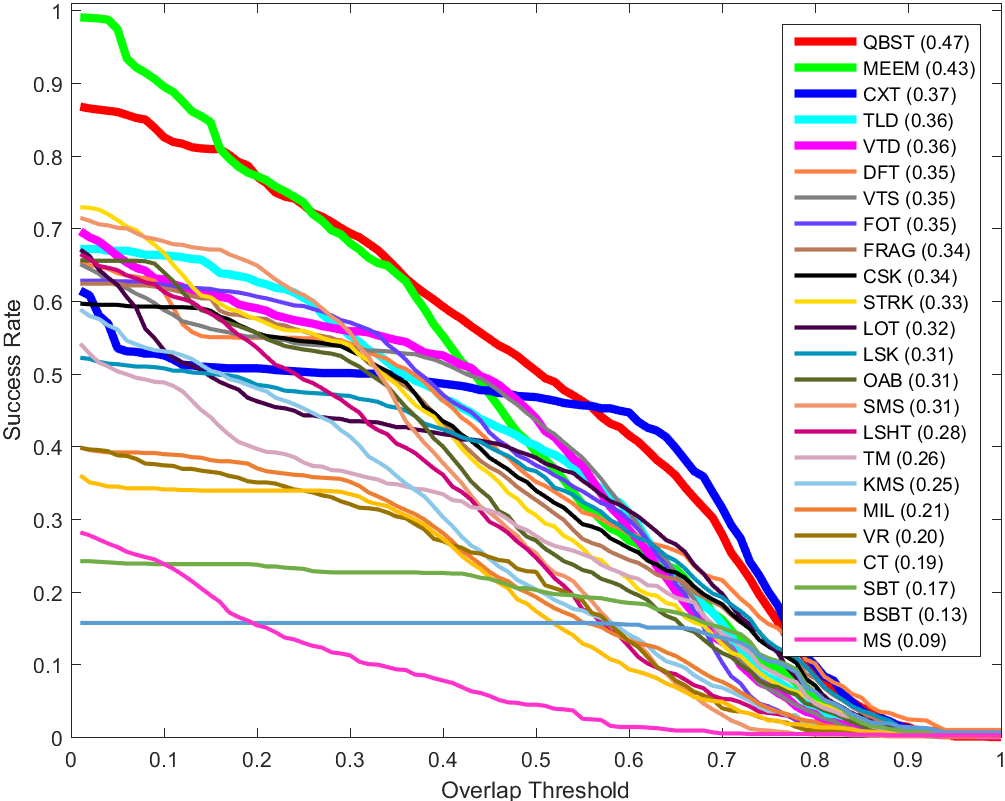 Low Resolution
Low Resolution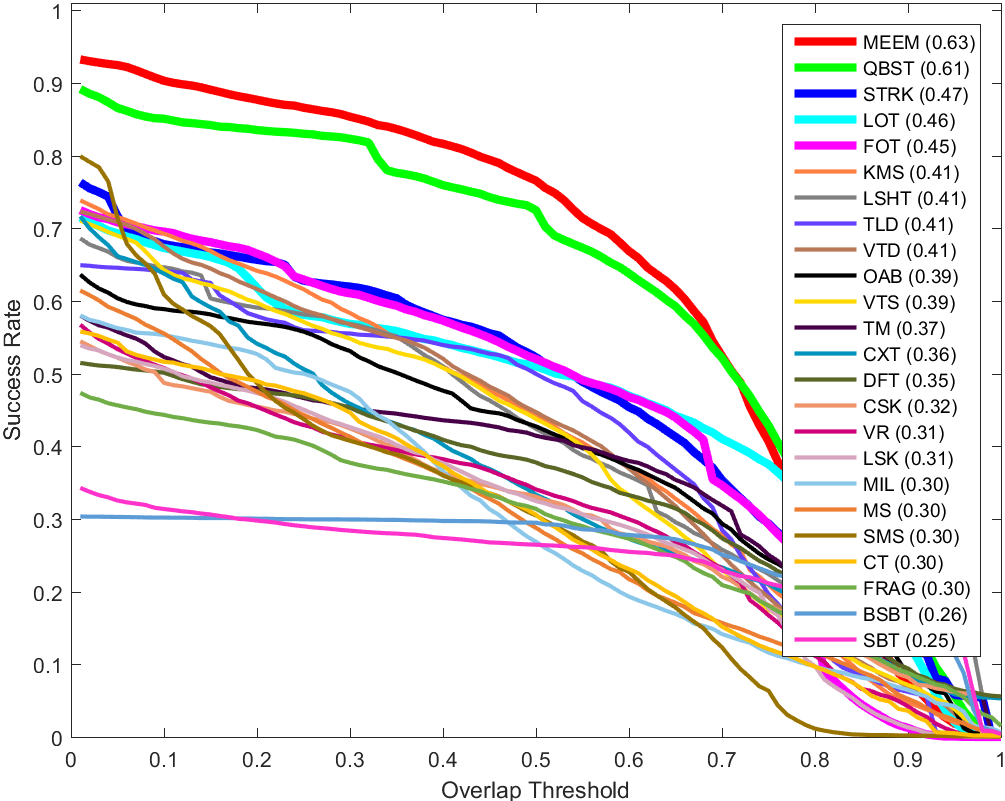 Blur
Blur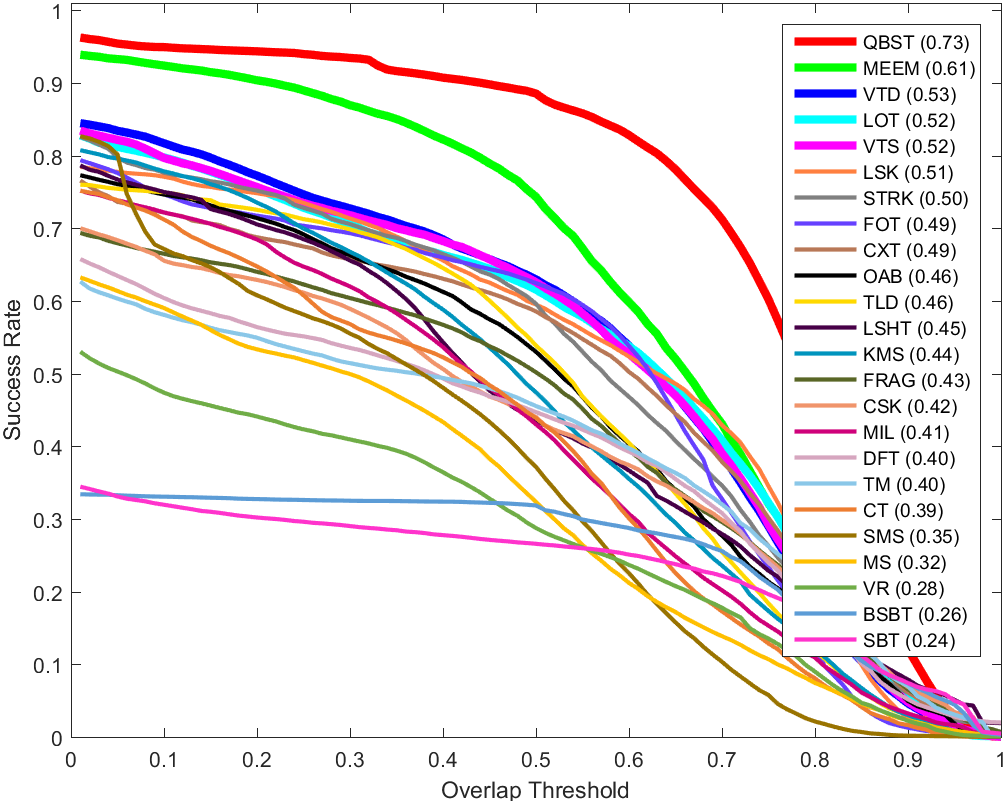 Occlusion
Occlusion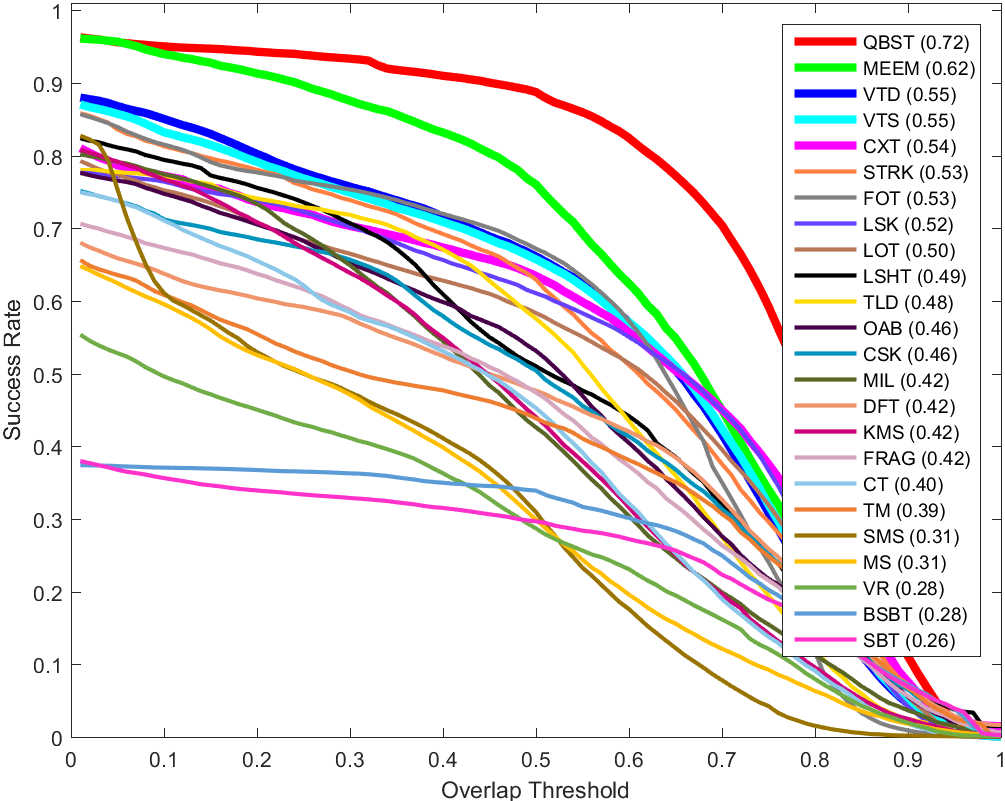 Z Rotation
Z Rotation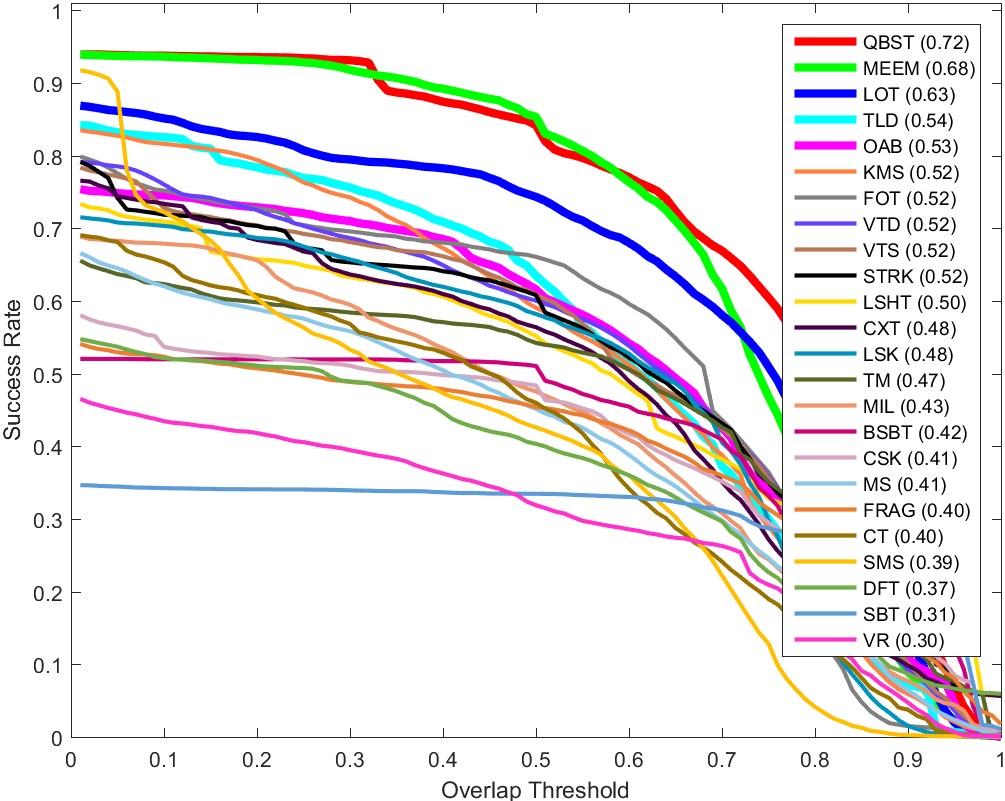 Shear
Shear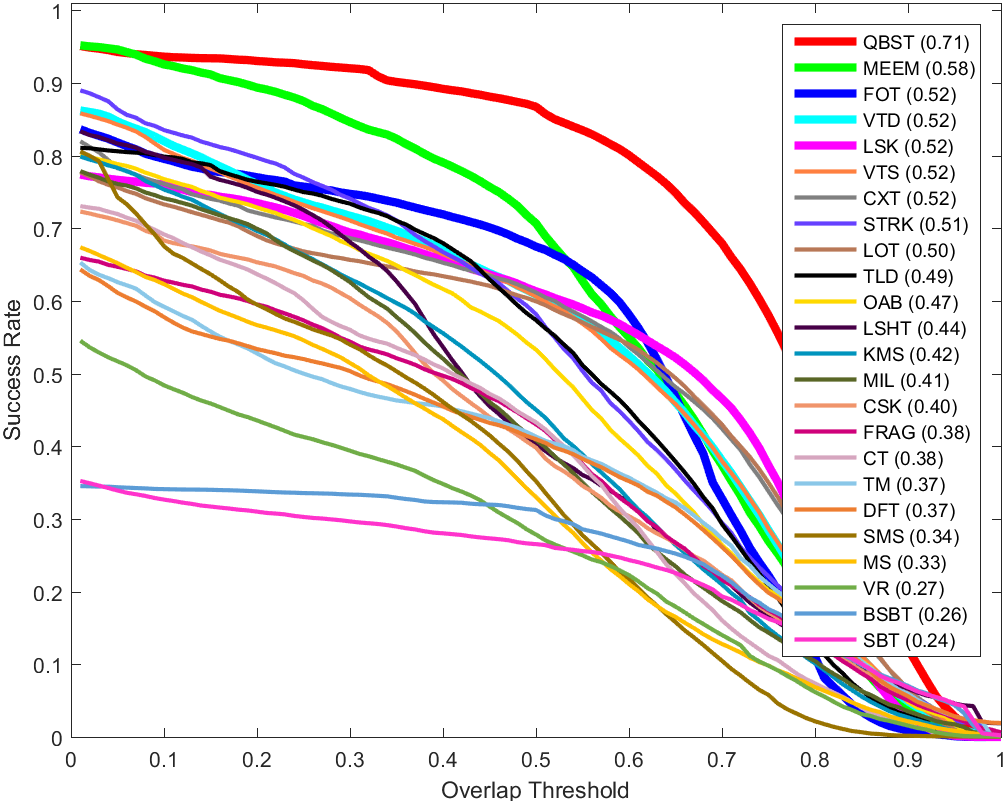 Scaling
Scaling
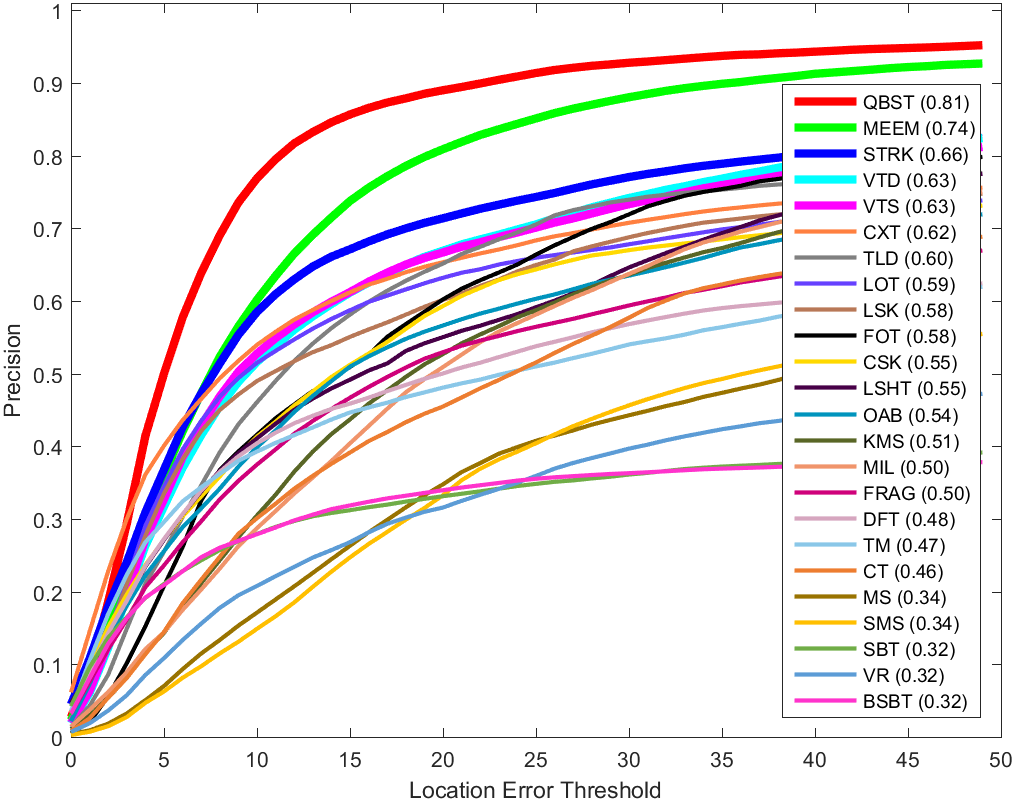 Precision Plot of ALL
Precision Plot of ALLOther Experiments
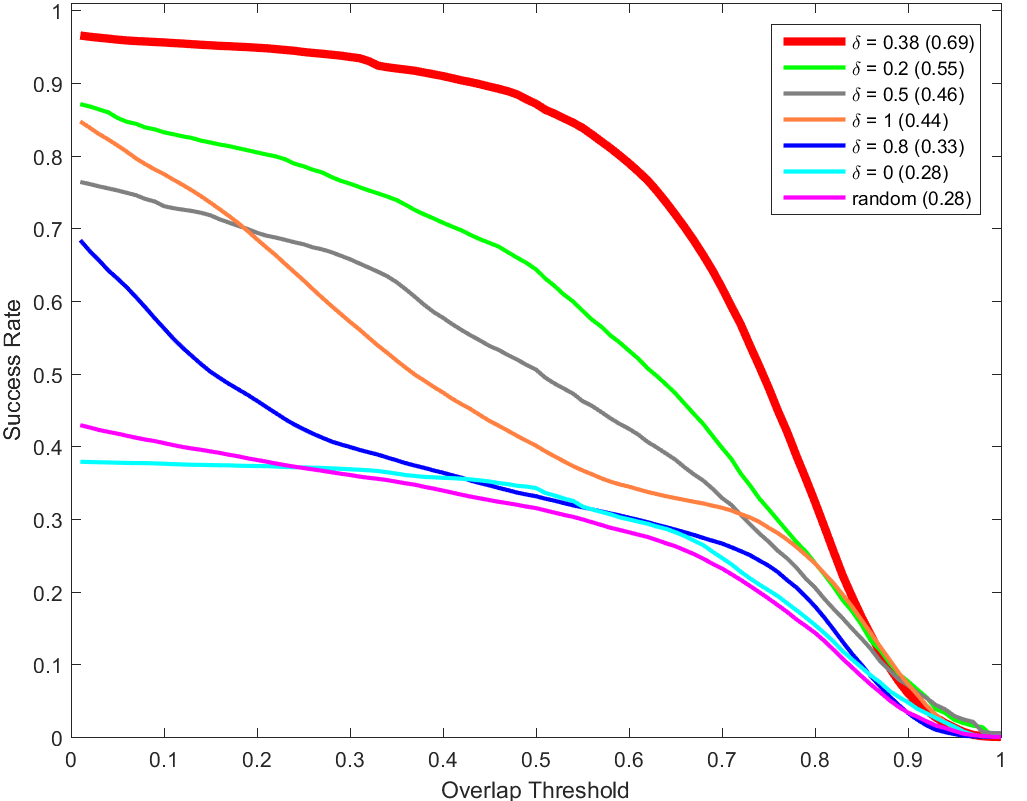
Arguably, the most important parameters of the system are labeling thresholds, since they control the "activeness" of the data exchange between the committee and the oracle. Assume that $\tau_l = -\delta$ and $\tau_l = +\delta$ ($\delta \in [0,1]$); if $\delta \rightarrow 1$ then the tracker would be a conventional binary classifier modeled by the oracle, and if $\delta \rightarrow 0$, the tracker would be governed solely based on the decision of the committee. The information exchange in one way is in the form of querying the most informative labels from the oracle, and on the other way is re-training the oracle with the labeled samples by the committee (for certain samples). We observed that this exchange is essential to construct a robust and accurate tracker. Moreover, such data exchange not only breaks the self-learning loop but also manages the plasticity-stability equilibrium of the tracker. In this view, lower values of $\delta$ correspond to a more-flexible tracker, while higher values make it more conservative.
BibTex reference
Download Citation , Google Scholar
@inproceedings{meshgi2017qbst,
author={K. Meshgi and S. Oba and S. Ishii},
booktitle={14th Conference on Computer and Robot Vision (CRV)},
title={Efficient Version-Space Reduction for Visual Tracking},
year={2017},
month={May},
}
Acknowledgements
This article is based on results obtained from a project commissioned by the New Energy and Industrial Technology Development Organization (NEDO).
For more information or help please email meshgi-k [at] sys.i.kyoto-u.ac.jp.




{kind=link}