Occlusion Aware Particle Filter Tracker to Handle Complex and Persistent Occlusions
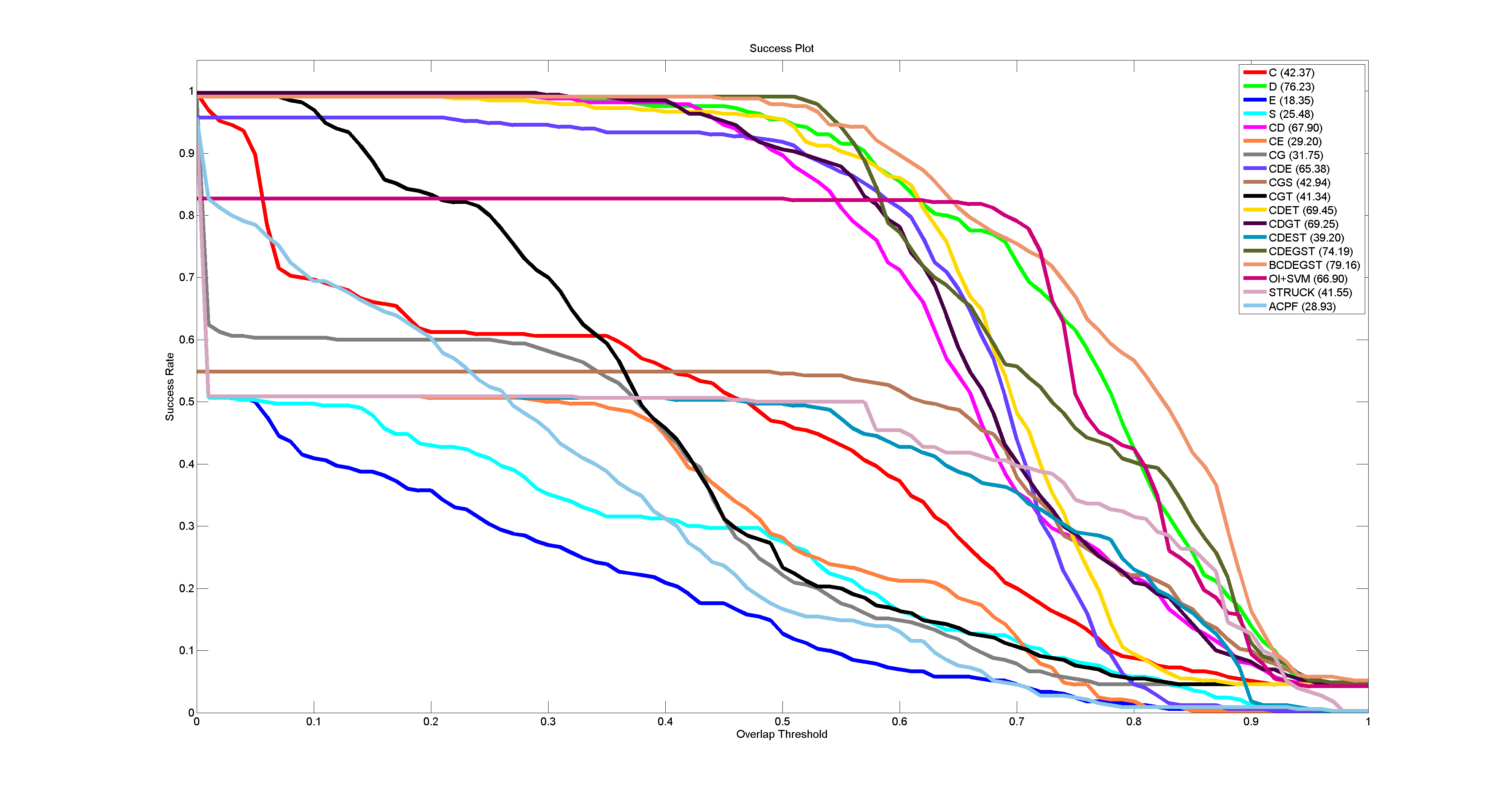
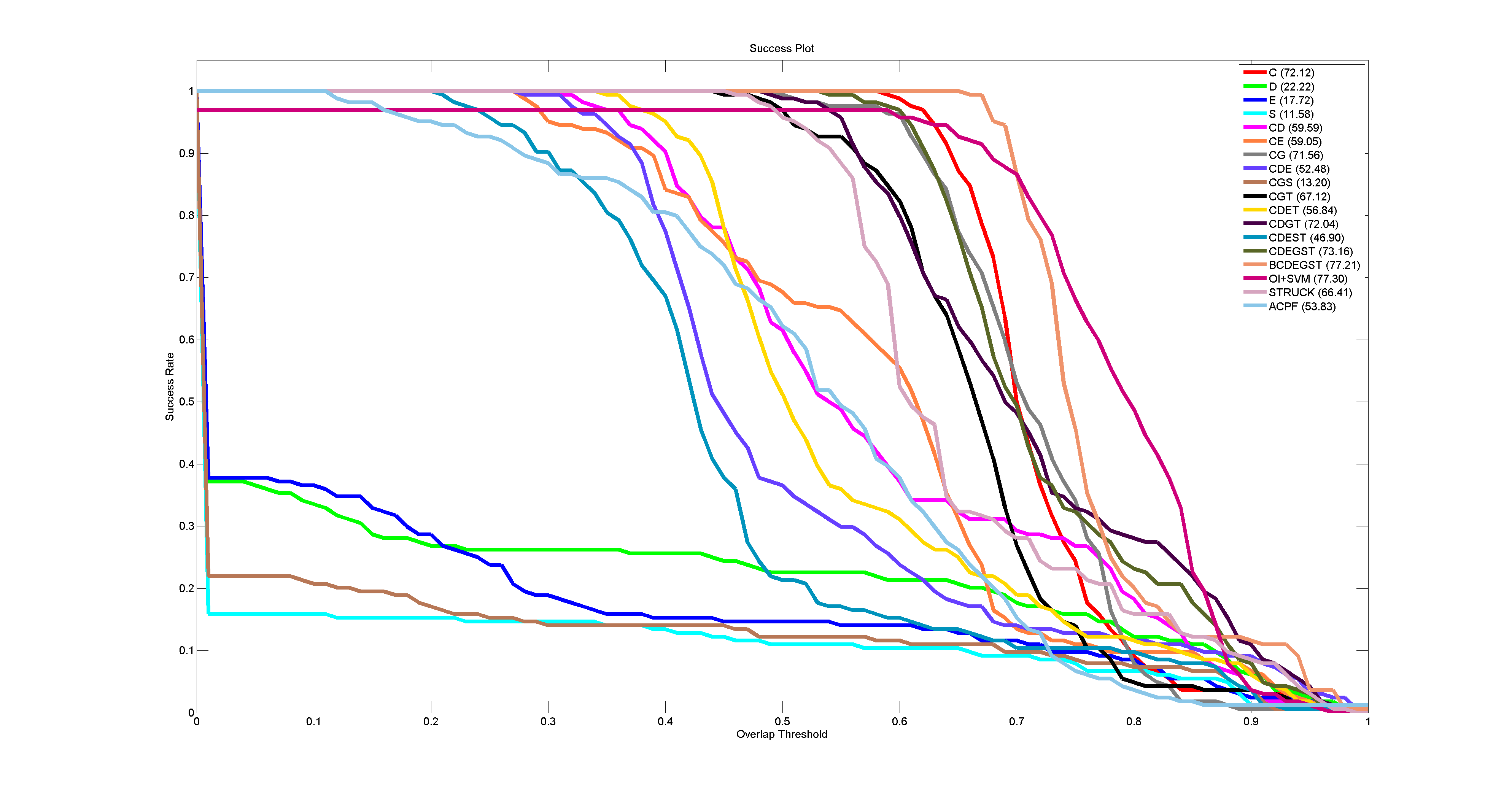
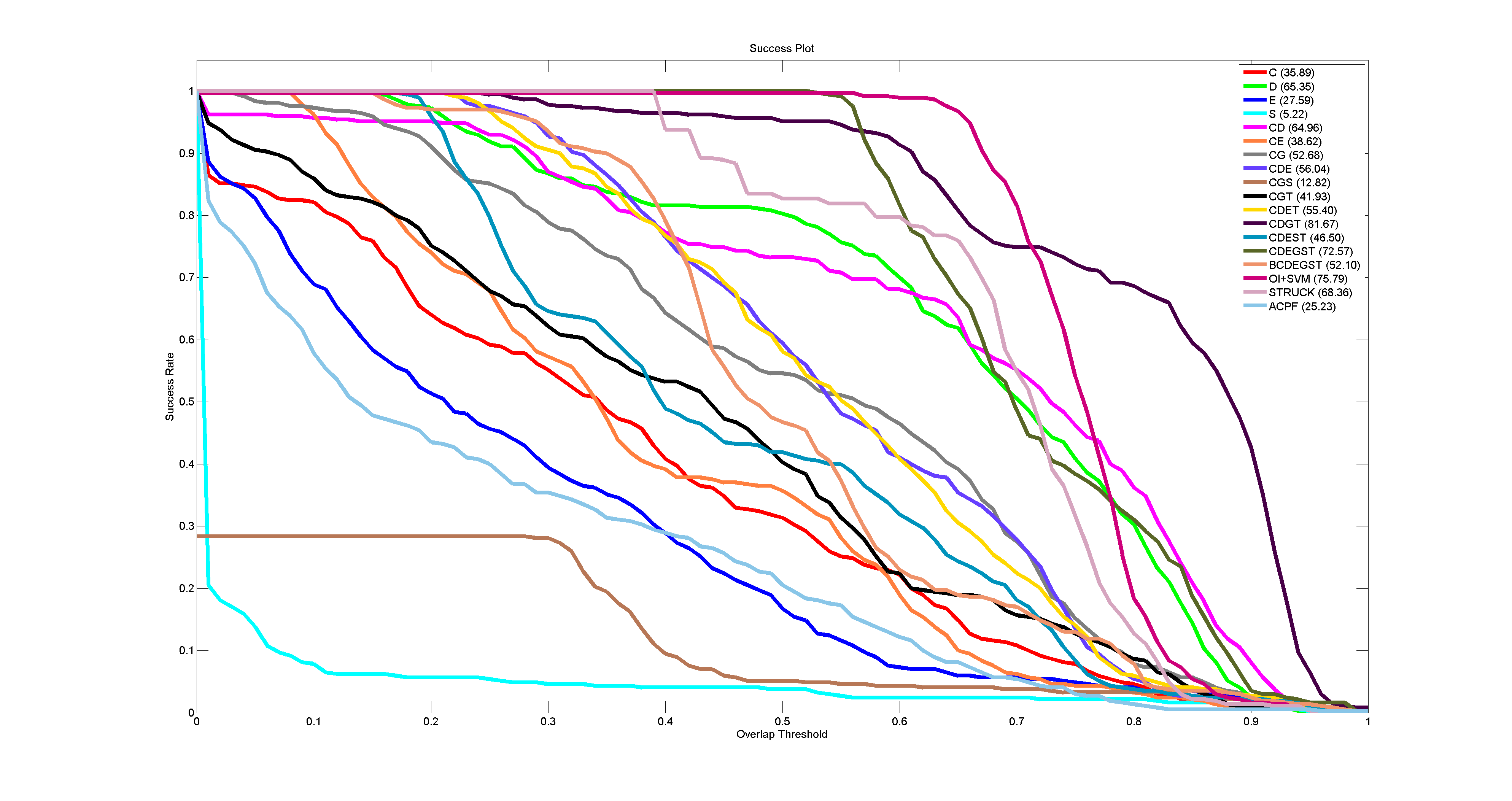
Although appearance-based trackers have been greatly improved in the last decade, they are still struggling with some challenges that are not fully resolved. Of these challenges, occlusions, which can be long lasting and of wide variety, are often left aside or partly addressed, due to the difficulty in its general treatments. To address this problem, in this study we propose an occlusion aware particle filter framework that employs a probabilistic model with a latent variable representing an occlusion flag. The proposed framework prevents losing the target by prediction of emerging occlusions, updates the target template by shifting relevant information, expands the search area for occluded target, and grants quick recovery of the target after occlusion. Furthermore the algorithm employs multiple features from color and depth domains to achieve robustness against illumination changes and clutter, so that the probabilistic framework accommodates the fusion of those features. Applied to Princeton RGBD Tracking dataset, the performance of our method with different sets of features was compared with those by the state-of-the-art trackers. The results revealed that our method outperformed the existing RGB and RGBD trackers by successfully dealing with different types of occlusions.
Title, Abstract and Keywords
Title:
Occlusion Aware Particle Filter Tracker to Handle Complex and Persistent Occlusions
Abstract:
Although appearance-based trackers have been greatly improved in the last decade, they are still struggling with some challenges that are not fully resolved. Of these challenges, occlusions, which can be long lasting and of wide variety, are often left aside or partly addressed, due to the difficulty in its general treatments. To address this problem, in this study we propose an occlusion aware particle filter framework that employs a probabilistic model with a latent variable representing an occlusion flag. The proposed framework prevents losing the target by prediction of emerging occlusions, updates the target template by shifting relevant information, expands the search area for occluded target, and grants quick recovery of the target after occlusion. Furthermore the algorithm employs multiple features from color and depth domains to achieve robustness against illumination changes and clutter, so that the probabilistic framework accommodates the fusion of those features. Applied to Princeton RGBD Tracking dataset, the performance of our method with different sets of features was compared with those by the state-of-the-art trackers. The results revealed that our method outperformed the existing RGB and RGBD trackers by successfully dealing with different types of occlusions.
Keywords:
- Particle Filter Tracker
- Explicit Occlusion Handling
- RGBD Tracking

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}